
Forschende entwickeln Sicherheitsalgorithmus für Bildverarbeitung
Forschende der Chung-Ang-Universität haben einen Algorithmus entwickelt, der die Kamerabilder besser auswertet.
Für die Navigation der Autonomen Fahrzeuge braucht es Sensoren, die die Wahrnehmung der Umwelt ermöglichen. Eine dieser Sensoren ist die Kamera und der Auswertung der Daten haben sich Forschende der Chung-Ang-Universität angenommen. Einige Firmen verlassen sich vor allem auf die Kamerabilder und lassen den Lidar weg.
Konzeptscheme. Quelle: intelligenttransport.com
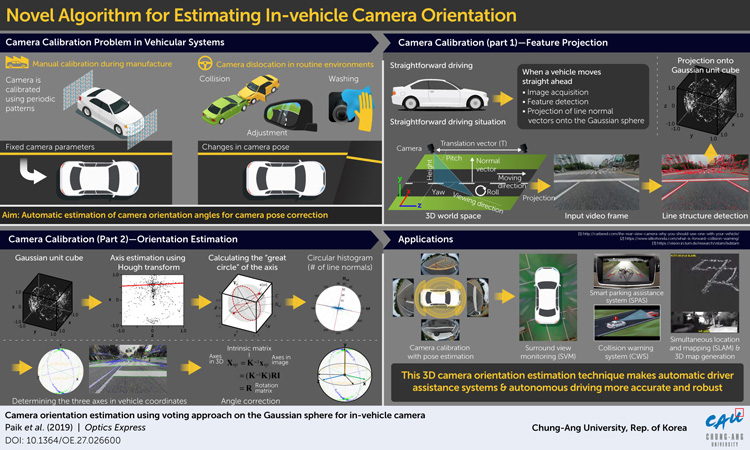
Ihr Algorithmus erlaubt eine zuverlässige Erfassung und Visualisierung der Daten. Bei der Kamerabilderauswertung löste man ein Problem. Denn während der Fahrt verschiebt sich zuweilen die Position der Kamera. Daher ist die Kalibrierung der Kamera besonders für die 3D-Sicht wichtig, um die Brennweite, den Winkel und die Vektoren zu beachten.
Bisherige Konzepte zur Korrektur, inklusive der Nutzung der Künstlicher Intelligenz, sind nicht schnell genug für das Autonome Fahren, so das Magazin intelligenttransport.com bezugnehmend auf die Forschenden. Daher entwickelte man eine Methode für Kameras mit festem Fokus an der Vorderseite des Fahrzeugs.
Mithilfe von parallelen Linien, kartesischen Achsen, auf den Objekten im Bild erschafft man ein orthogonales Koordinatensystem, welche auf die Gaußsche Kugel projiziert und die Ebenen zu diesen parallelen Linien werden extrahiert. Im Vergleich zu den Fluchtpunkten kann man mithilfe eines kreisförmigen Histogramms die Position des Betrachtens messen.
Mit dieser Methode erreichte man in Tests eine hohe Genauigkeit, wobei Bäume und Büsche den Algorithmus irritieren können.









